面向残障患者的上肢康复机器人关键技术与工程样机
成果名称 | 面向残障患者的上肢康复机器人关键技术与工程样机 | |||||||
成果联系人 | 高翔/徐国政 | 职称 | 教授 | 所在单位 | yl6809永利官网、yl6809永利官网 | |||
联系电话 | 18951896156/13913880419 | xugz@njupt.edu.cn | ||||||
技术成熟度 | 技术分类 | |||||||
核心专利号 | ZL201610183962.4,ZL201710226573.X,ZL201810413775.X,ZL201811350009.X,ZL201710412172.3 | |||||||
所属学科方向 | 一级学科 | 仪器科学与技术 | 二级学科 |
| ||||
应用行业 | 医疗康复,养老服务等行业 | |||||||
项目概况: 伴随人口老龄化的加剧,在老龄人群中将会有大量因脑血管血栓或破裂出血而导致的脑卒中患者;此外,因各种意外事故造成的脊髓损伤病人正以惊人的发病速度与日俱增。上述中枢神经系统疾病会造成患者运动、感觉和认知等功能受到损害甚至丧失,它不仅给患者日常生活带来种种不便,同时也给社会、家庭带来沉重负担。因此,寻求有效的康复手段,使患者能够在一定程度上恢复肢体失去的功能,不仅有利于提高患者本身的生活质量,亦可减轻家庭及社会的经济负担。传统的基于康复医师的手把手训练方法不仅效率低下、强度偏弱,而且治疗效果及康复评价易受医师主观临床经验制约。为解决传统运动康复治疗过程中存在的诸多问题,yl6809永利官网机器人信息感知与控制研究所面向因中风、意外事故、骨关节疾病导致的上肢运动功能障碍患者,研制了针对肩、肘、腕及手部康复机器人,目前已经完成第二代工程样机研制,进入临床测试与功能完善阶段。 | ||||||||
关键技术: yl6809永利官网机器人信息感知与控制研究所高翔教授、徐国政教授、陈盛博士、王强博士、朱博博士、谭彩铭博士等共同研发了上肢康复机器人的关键技术与工程样机: 仿生结构设计 分析人体肩-肘-腕-指等关节的生物力学特征,模块化设计并仿生优化肩、肘、腕及指关节康复机器人外骨骼式机械结构。 人机交互控制 分别建立肩、肘、腕及指关节外骨骼式康复机器人动力学模型,针对不同训练模式,设计力/位置控制策略,使康复训练过程中机器人的辅助更加柔顺自然。 功能软件设计 面向上肢肩、肘、腕及手部康复机器人的不同康复训练需求,开发模块化的功能软件,实现对上肢康复机器人不同拓扑构型的无缝对接。 | ||||||||
应用领域和市场前景: 据《第四次中国城乡老年人生活状况抽样调查》,目前我国失能、半失能老年人4063万,占老年人口的18.3%;全国共有康复机构6914个,能开展肢体残障康复训练的服务机构达2181个;全国每年能对36.7万肢体残障患者实施康复训练,而我国肢体残障患者有2400 多万人,因此,康复装备供应与临床需求存在巨大缺口。根据《2016-2020年中国医疗机器人产业深度调研及投资前景预测报告》,预测中国康复机器人市场规模将从2015年的4300万美元增长至2020年的18亿美元。 本研究所研制的上肢康复机器人,包括肩、肘、腕及指关节,涉及整个上肢,同现有上肢康复机器人相比,具有以下竞争优势:(a) 在整体功能方面,不仅设计了面向住院康复治疗的肢体训练功能,还融入了面向居家康复的日常生活服务功能;(b) 通过结构拓扑重构,依靠单台康复机器人,不仅能满足不同体型患者上肢人体测量学变化,还能满足上肢不同关节单独或组合进行康复的需求。 | ||||||||
合作方式(技术转让,技术开发,技术服务,技术咨询,技术入股): *技术转让 *技术开发 *技术咨询 *技术服务 *技术入股 | ||||||||
图片:(1-5张,文件大小不低于1MB,图片清晰,并标注图片说明)
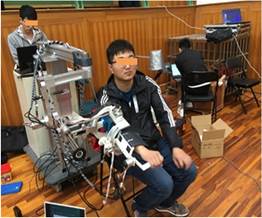
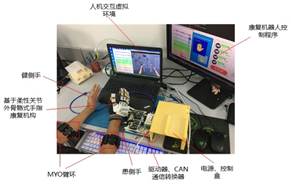
图1:肩-肘-腕外骨骼康复机器人工程样机 图2:手部外骨骼康复机器人工程样机
图3:上肢肩关节康复机器人临床测试 图4:手部康复机器人镜像训练功能测试
| ||||||||